Motivation
Our bodies are wired to transmit electrical pulses from sensory receptors to the brain where the sensations are perceived and for our brain to transmit electrical pulses to our actuators (muscles) to move, run, dance, express ourselves. As well-designed as our bodies are, there are a plethora of potential problems that can prevent our bodies from functioning as they were designed to.
I am so thankful for the sights we have to see, the flavors we have to taste, the sounds we can hear, the sports we can play, the beauty in all the human body was made to do. Although I acknowledge life does not require such activities in order to be full, if there is a way to restore movement, vision, hearing, or other sensations to people have lost such functions, I want to be part of making such possibilities available to them.
The project I am currently involved in has been made possible by the undertaking of pioneers in the brain-machine interface project which at the present targets developing devices to restore voluntary control over movement to paralyzed patients. An estimated 2 million people around the world suffer from spinal cord injury (SCI) [Christopher Reeve Paralysis Foundation]. In the U.S. alone, there are approximately 200,000 spinal cord injured individuals, with 11,000 incidences of SCI per year [Spinal Cord Injury Information Network]. 52% of these individuals are diagnosed with paraplegia while 47% are diagnosed with quadriplegia. SCI can impact every aspect of life, disabling an individual from walking, from feeding or dressing themselves, from adequately expressing themselves, and in general limiting their independence [PBS Scientific American Frontiers]. "The main message of hope [to those who suffer from spinal cord injury] is that there is hope.... There is applied science going on all over the world right now to treat patients.... Don't let anyone tell you it's some pipe dream. It can happen and will happen much faster than you think." [Christopher Reeve].
Project Overview
The focus of these research efforts is to find the optimal strategy for sampling and processing neural signals from the billions of neurons in the brain. The goal is to maximize information about motor control parameters while improving the efficiency of the brain-machine interface. Thus, a measure is needed to gauge success of decoding neural activity, for which Shannon mutual information is the primary candidate. In order to implement a practical and useful calculation of mutual information, both knowledge about possible neural mechanisms encoded in the brain and about computational methods to accurately estimate mutual information between multi-dimensional signals are needed.
This information measure can be applied to answer questions such as where are the "important" neurons, how many neurons do we really need before only marginal information is gained, and can multi-unit signals provide the necessary information, enabling the elimination of the costly spike sorting process?
For more about information theoretic analysis of neural coding, click here.For more about the spike sorting problem, click here.
Strategy for extracting the primary encoding sub-assembly
A method is being developed for quantitatively selecting the neural units to included as inputs into the neural decoding prediction algorithm. This subset of the total population of recorded units will be referred to as the primary encoding sub-assembly (PEA). All units will be rank ordered according some criterion variable, and those units which together exceed a designated threshold of mutual information will be selected as part of the PEA.
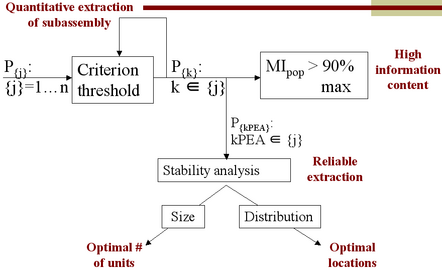
Four different variables have been explored as appropriate selection criteria
- Principle component weights: Principle component analysis would be used to extract ensembles of co-activated neurons and would rank order units by the degree of modulation of their activity.
- Canonical correlate weights: Canonical correlation analysis finds subassemblies with joint activity most highly correlated to some mapping of motor parameters.
- Single-unit information: The idea would be to identify neurons that encode the most information individually.
- Variance: This measure identifies units whose individual activity is being modulated most.
These methods will be tested using a network model, which will either be borrowed from students in the Computational Modeling Lab (P.I. Craig Henriquez) or generated as described below.
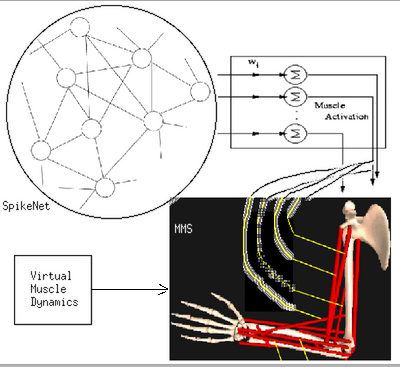
A neural network will be modelled with Spike Net, an object-oriented %event-driven simulation package that is able to update the connections of 100,000's of neurons in real time with over 50 synapses per neuron at average firing rates of 1 spike/s. For the purposes of this research, the firing rates will be increased to mimic cortical neurons at the cost of running the simulations slower than real-time. The outputs of these networked integrate-and-fire neurons will be i nterfaced with the Virtual Muscle model using the Musculoskeletal Modeling in Simulink (MMS) tool developed by the Alfred Mann Institute at USC.
The mapping of neurons to muscle fibers will be based on Todorov's muscle-based encoding model, and the connectivity and density of neurons will be decided bas ed upon anatomical studies of the primate motor cortex. Because of the nature of the developers' research, the neural units in SpikeNet are suitably designed to simulate visual cortical neurons, with dendritic arbors mapping to visual receptive fields. This %feature will be exploited to implement a M1-to-muscle mapping in which the anal ogue for the visual receptive field will be the muscle fiber that is activated by linear combinations of spike activity in Todorov's model. Thus, instead of a retinotopic map, the network will form a loosely topographical map of arm musculature. To adjust the network model, a subset of neurons that mimics the physical distr ibution of the neurons sampled in vivo will be first be observed. The tuning of the unit, which in the model is represented by the unit's ``receptive field,'' will be adjusted until similar characteristics are obtaine d in the activity of units. The sharpness of tuning will be adjusted in proportion to the difference between th e perceptron's single-unit MI and a corresponding in vivo unit's MI. Synaptic connections will be reduced or increased in proportion to the difference between the unit's PC weight and its in vivo counterpart. The simulation parameters for neighboring units will be adjusted simultaneously and will be initialized with parameters similar to its nearest PEA neighbor. Different configurations of connectivity will also be used: independe nt (each set of hierarchical units encodes an independent attribute, no lateral connections, strict labeled-line coding), non-cooperative (units can encode the same attributes, but with no lateral connections), and cooperative ( overlap in encoding, lateral connections). \cite{johnson}. This model will be used to generate data and per form information theoretic calculations on samplings of the neural network as is described in the following sections.
Spike Net used to simulate spike outputs of hundreds of thousands of interconnected cortical neurons whose outputs can contribute to the activiati on of one or more muscle fibers through a first order M1-to-muscle based encodin g model. The activations feed the inputs to the MMS model whose dynamics are co ntrolled by the Virtual Muscle model. Muscoloskeletal arm image modified from http://ami.usc.edu/Projects/mgwebpage/humanarm.asp.